Last week, I had mentioned finding an essay I wrote about assessment in an Honors Calculus sequence I had designed. I took some time to set the stage for this essay — so now it’s time to dive right in!
A caveat: This essay was written in 2011. I will attempt to keep as true to the original essay as I can, though I’ll edit for clarity and updated information/links, and will also [add commentary in square brackets]. So here goes!
“To educate is to illuminate the power of ideas.
This, of course, is an ideal — certainly not the last to be articulated, nor perhaps the highest. But putting practicality aside for the moment, how might we take on such a view of education?
Consider the example of planetary orbits. Tying together history, technology, politics, physics, and mathematics through a discussion of Kepler’s laws is — yes — illuminating. Of course there is no single idea at play here, but consider this: Kepler was perhaps the first astrologer to become an astronomer. He, in contrast to so many of his contemporaries, asked not only where a particular planet should be on some future date, but why it should be there. In his mind, predicting the positions of celestial bodies for the purpose of casting horoscopes for royal personages was not enough — he wanted to know why. That, however, would have to wait until Newton and the application of calculus. And the power of that idea!
There is no need to present further historical examples. What is important, however, is to move beyond historical ideas and address the issue of the power of a student’s own ideas. Two semesters of teaching Advanced Problem Solving [a course I taught at IMSA which emphasized the writing of original mathematics problems] have shown me that having students write original problems motivates them to learn. They are timid at first — for how could they come up with an original problem? But after some success, students are excited to create — and as a result, learn about a particular topic in a more profoundly personal way than they might have otherwise. (Interestingly, the writing of original problems as a teaching tool is common in eighth-grade Japanese mathematics classrooms. See The Teaching Gap by Stigler and Hiebert, ISBN 0-684-85274-8, pp. 6–41.)
Other assessments are more routine: students are informed that they need to be able to solve linear and quadratic equations, as well as graph linear and quadratic functions. This is perhaps more manageable — the task is well-defined within narrow limits. But it is rather different in nature than creating an original piece of work.
Abraham Maslow articulates a similar difference in a discussion of growth theory (see Toward a Psychology of Being by Abraham Maslow, ISBN 0-442-03805-4, p. 47). Psychologically, why do children grow? “We grow forward when the delights of growth and anxieties of safety are greater than the anxieties of growth and the delights of safety.” From an educator’s point of view, this implies making the classroom a safe environment for creativity and exploration.
“The opposite of the subjective experience of delight (trusting himself), so far as the child is concerned, is the opinion of other people (love, respect, approval, admiration, reward from others, trusting others other than himself).” (Maslow, same source, p. 51.) Who comes to mind is the student afraid of enrolling in BC Fast-Track [the colloquial name of the Honors Calculus sequence at IMSA] because he or she might not earn an A. [I did have a very capable student who was so concerned about grades, he opted to take the more traditional calculus sequence. I actually met with his father, who wanted a guarantee that his son would earn an A in the course. Given the nature of the course, there was naturally no way I could give such a guarantee.] Or perhaps the student who shuns a difficult course and takes an easier one instead. Grades are just that — opinions of other people.
The assignment of letter grades is not necessary for learning, but is merely practical for other reasons. The assignment of letter grades does nothing to illuminate the power of ideas.
A quick Internet search reveals that the assignment of A–F letter grades is a fairly recent phenomenon, not making its way into high schools until the mid-twentieth century. In the early twentieth century, grades of E (Excellent), S (Satisfactory), N (Needs improvement), and U (Unsatisfactory) were also used.
The question of whether a letter-grade system of evaluation is the best option for a school like IMSA is perhaps a worthwhile one (some argue against grades at all [this was the link, but it is now a dead end: http://www.alfiekohn.org/teaching/fdtd-g.htm ]). That is a question which cannot be answered in the short-term, if the question is considered relevant. So the question is this: given that letter grades need to be assigned this semester, what approach should be taken?
What do letter grades mean?
The only consensus I have heard, so far, is that earning a grade of A, B, or C means that a student exceeds, meets, or does not meet expectations. Of course, this is reminiscent of E, S, and N. Moreover, a grade of C is passing, so that a student receives credit for a course even if they do not meet expectations.
But this is not what the grades currently mean. Essentially, points are assigned to hundreds of problems given throughout semester, whether on assignments, papers, quizzes, or exams — and an arbitrary weighted sum of these point assignments is converted to a letter. (Of course letters may need to be converted to numbers so that they may be used by an online grade calculator to compute a number which is then converted back to a letter.)
What does this mean about meeting expectations?
Well, nothing really. I would venture to suggest that “meeting expectations” currently means “enough A’s, but not too many C’s.” Perhaps this is politically necessary, but expedient. The performance of our students determines our expectations, rather than the other way around.”

 by the cubic polynomial
by the cubic polynomial

 and
and  are the number of vertices, edges, and faces, respectively, on a convex polyhedron, then
are the number of vertices, edges, and faces, respectively, on a convex polyhedron, then
 denote the number of sides on the regular polygons, and let
denote the number of sides on the regular polygons, and let  denote the number of polygons meeting at each vertex of the Platonic solid. (Those familiar with polyhedra will recognize these as the usual variables.)
denote the number of polygons meeting at each vertex of the Platonic solid. (Those familiar with polyhedra will recognize these as the usual variables.) sides on all of the polygons.
sides on all of the polygons.
 also counts all of the sides on the polygons. Since we are counting the same thing in two different ways, we have
also counts all of the sides on the polygons. Since we are counting the same thing in two different ways, we have
 vertices on a Platonic Solid, and if
vertices on a Platonic Solid, and if  is the total number of vertices on all of the polygons. Again, having counted the same thing in two different ways, we have
is the total number of vertices on all of the polygons. Again, having counted the same thing in two different ways, we have

 and since at least three polygons must come together at the vertex of a convex polyhedron, we must also have
and since at least three polygons must come together at the vertex of a convex polyhedron, we must also have 
 and
and 
 so that
so that
 and rearrange terms, giving
and rearrange terms, giving
 to both sides so that the left-hand side factors nicely:
to both sides so that the left-hand side factors nicely:
 then
then  and
and  must both be integers at least
must both be integers at least  but since their product must be less than
but since their product must be less than  they can be at most
they can be at most 
 or
or 
 then
then
 and
and  we have the octahedron, since
we have the octahedron, since  means that four triangles meet at each vertex.
means that four triangles meet at each vertex.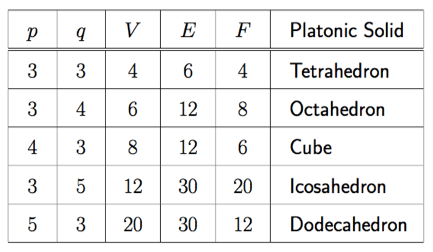
 And the fact that similarity and congruence on the sphere are the same concept, unlike in Euclidean geometry. For example, if the angles in a Euclidean triangle are the same in pairs, the triangles are similar. But on a sphere, if the angles of two spherical triangles measured the same in pairs, they would necessarily have to be congruent.
And the fact that similarity and congruence on the sphere are the same concept, unlike in Euclidean geometry. For example, if the angles in a Euclidean triangle are the same in pairs, the triangles are similar. But on a sphere, if the angles of two spherical triangles measured the same in pairs, they would necessarily have to be congruent.
 dimensions is of the form
dimensions is of the form
 and calculating a simple ratio reveals that you’ve got
and calculating a simple ratio reveals that you’ve got  of your potato left.
of your potato left. of your potato left, where
of your potato left, where  so after you’ve peeled your potato, you’ve only got about one-third of it left!
so after you’ve peeled your potato, you’ve only got about one-third of it left!