In the past few weeks, we looked at the hypercube in four-dimensional space. We approached this intriguing geometrical object using thinking by analogy; that is, we looked at one-, two-, and three-dimensional hypercubes (segments, squares, and cubes), and imagined potential properties — such as the number of vertices, edges, faces, and cells — of a four-dimensional analogue.
Moreover, we made these counts in two different (although related) ways, and obtained the same results. We ended last week’s discussion with the following question: yes, we obtained these counts in two different ways, but exactly what were we counting? In other words, what was this hypercube we were analyzing? Did we make the extension into four dimensions in a mathematically sound way?
We won’t be able to go into all the details in this post, but we’ll outline the main ideas which suggest that our reasoning so far in the series to this point could be made rigorous.
So what we need to do is actually say just what a hypercube in four dimensions actually is. There are different ways to make this precise, but perhaps the easiest way is to use Cartesian coordinates. Most readers are likely fairly familiar with representing a point in the plane by the Cartesian coordinates 

What about four-dimensional space? It is natural to just “add” another coordinate, and represent a point in four-dimensional space by 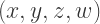

You might ask, how can we just add another coordinate? In other words, how can we just add a dimension? To do this rigorously, we would need to study some linear algebra — in particular, the geometry of 

So let’s take this point for granted, and do a little more thinking by analogy. Or perhaps it might be better to say “defining” by analogy. For example, we might define a square, together with its interior, as

Now this certainly seems a bit more complicated than how a square is typically defined in elementary geometry. But this set of points is easy to sketch in the plane. Moreover, given this algebraic description of the square, it is easy to enumerate the vertices: 



Alternatively, the set containing these four vertices is given by

Moreover, we can algebraically describe the top edge of square:

But do you see the catch? Suppose we are given an algebraic description of a set of points in the plane, such as the square above. How do we algebraically define its vertices? edges?
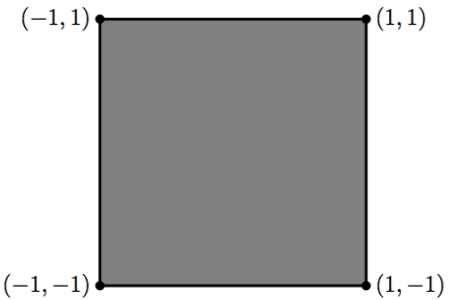
Ask yourself the following question: can you find a point in the set described above — the square — which has the property that there exists a line which intersects the square in only that point? The answer is yes: but such a point must be a vertex of the square. So we might use this property to define the vertices of a set.
But we must be careful. With this definition, every point on this pair of line segments would then be a vertex!
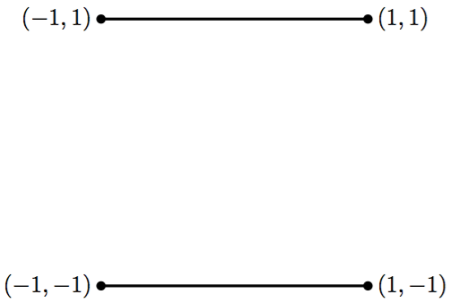
This is certainly not what we want. To see how to address this issue, we might introduce another concept: convexity. You might remember this idea coming up in my post about polygons, but here is a brief refresher. A convex set has the property that the segment joining any two points of the set lies entirely within the set.
Using polygons as examples, the two polygons on the left would be convex, but the two on the right would not be convex.
This idea generalizes into any number of dimensions; but we’ll look a little more at two dimensions right now. Looking back at the picture of the square, and the picture of the two line segments, we observe that the square is a convex set, while the pair of segments is not.
So we might be tempted to say that if a set is convex, then any point which is the intersection of that set and some line is a vertex of the set. This works for the square, but…consider the circle shown below.
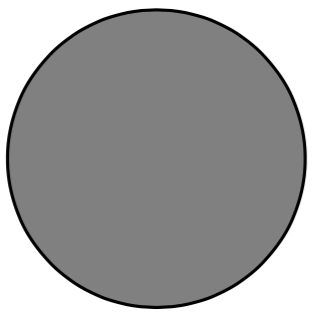
Are there points which are the intersection of this convex set and a line? Yes there are — any point on the boundary of the circle, since a tangent line to a circle always intersects the circle in a single point.
So does a circle have infinitely many vertices? In this case, we would actually call points on the circle extreme points of the convex set. So a vertex would be just one example of an extreme point of a convex set.
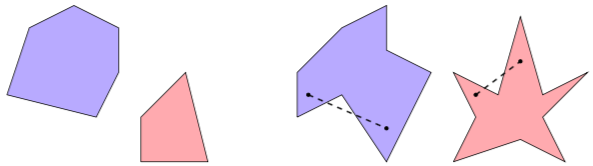
Now what about the convex set here?
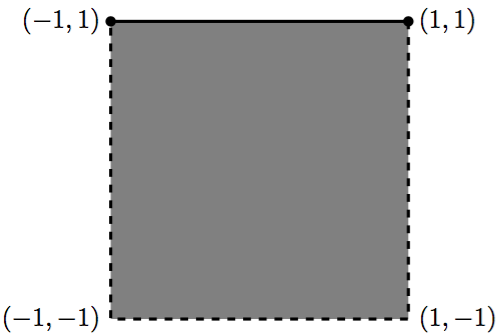
The dashed lines indicate that part of the boundary is missing. This set has just two extreme points, not four. The problem here is that this set is not closed in a topological sense. I won’t say more about topology here — it’s quite a huge topic! — but you can see that the number of vertices on a “square” depends critically upon whether the boundary is included.
I hope you can see that there are several issues involved in gleaning geometric properties from a purely algebraic description. But the point is this: we may define a hypercube as the set

This is a completely unambiguous definition, but the difficulty lies in describing geometrical properties of a set using only rigorous mathematical definitions and not relying on what it looks like.
So this is why, mathematically, we can say just what a four-dimensional hypercube really is. It takes a bit of work to tease out all the properties of a hypercube, but it can be done.
And no, this isn’t the only way to define a hypercube either….concepts such as convex hull or Cartesian product may be used to give other descriptions as well. Feel free to look these ideas up if you’re interested in learning more about them….

Separate cells of the 5-cell (pentachoron).
Separate cells of the 8-cell (tesseract).
Separate cells of the 16-cell (hexadecachoron).
Separate cells of the 24-cell (icositetrachoron).
LikeLike
Thanks for these!
LikeLike