I decided to undertake a new venture while staying home during the pandemic: write a puzzle book!
I’m not sure how the idea ultimately condensed from a gaseous nebula of random ideas, but one thought was that with so many people at home now, they needed something fun to do. Why not puzzles? With several print-on-demand platforms available, I could even self-publish!
If you’ve been following my blog from the beginning, you know I’ve written many posts about creating new and interesting puzzles. (You can search the index to easily find them.) And as a consumer of puzzle magazines for decades, I’m pretty familiar with what’s out there. Some of the current magazines include exactly the same type of puzzles they had when I was growing up.
Well, I could do better, I thought. (Although it will ultimately be up to my readers to decide that!) Since I love word, logic, and math puzzles, I’d make sure there was a nice variety. There was a particular challenge — if you look at puzzle magazines, you’ll notice that particular authors contribute the same type of puzzle to one or more different magazines. But there is just one of me.
Further, if you go to amazon.com, you might be (like I was) underwhelmed by the quality of many of the puzzle books. So I needed to create a wide variety of challenging puzzles which were not currently in circulation.
And so The Puzzle Cabaret was born! I put some sample puzzles on The Puzzle Cabaret’s website and my Twitter feed, @cre8math, so feel free to go there and check them out.
What made this such a fun project for me was that I got to use so many different tools in the toolbox I’ve outfitted over the years. Of course there is the creative task of creating new and innovative puzzles. I relied on Mathematica for some help, such as a puzzle involving words made up of three-letter words, like lithographer — LIT + HOG + RAP + HER. Rather than look through a dictionary myself, I wrote a program which searched Mathematica‘s large dictionary for 6-, 9-, and 12-letter words like this.
Or what about letters that can come before “Q” in a word? Easy to search a dictionary. I did learn a lot of new words this way — such as the only word (aside from its plural) which contains the letters “LQ” in order. Hats off to you if you know it!
So having some programming experience was helpful. My experience with mathematical art — a main thread in my blog — was helpful. I was able to do all the layout myself in LaTeX with the TikZ plugin. It’s nice because each page is essentially a sheet of graph paper — you can give exact coordinates of any page element you want so everything lines up perfectly.
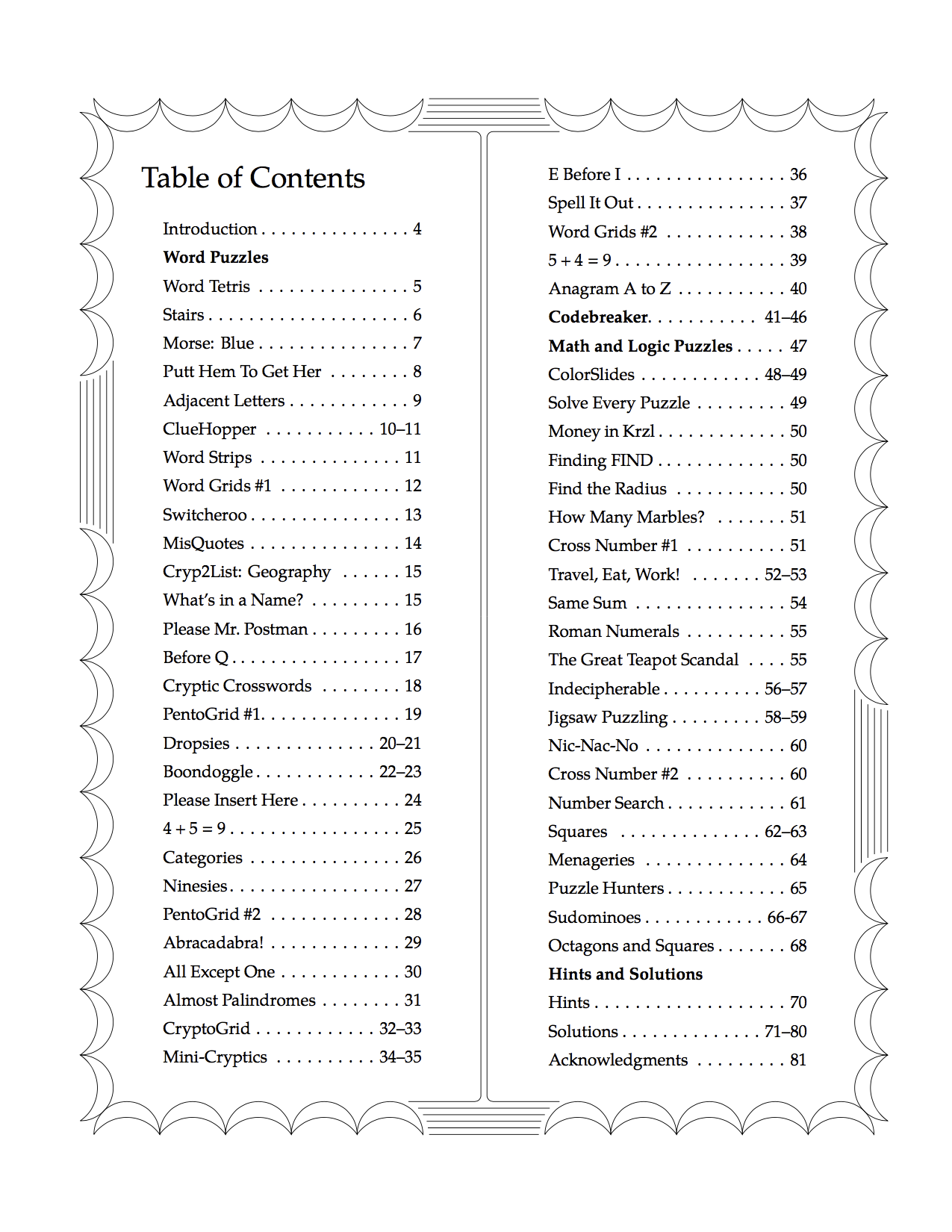
I especially enjoyed creating borders around special pages — like the Table of Contents or separator pages between sections of the book. The challenge was designing something intriguing in black-and-white which would look good even if the print quality was not what you’d expect in a publisher-printed book.
Experience writing papers, books, book chapters, and teaching materials meant that I’ve become a pretty decent editor. So I could do that on my own, too. It’s tricky, though — looking at something you write over and over again. I undertook several rounds of proofreading, and kept findings things to fix each time. But at some point, you just have to stop and accept the fact that yes, there will still be a few typos in the finished book….
My design experience also meant I was able to create my own cover. It was a fun project. I went for “less is more,” and was driven by one overriding thought — my cover should shout “CLICK ME!!!” Well, I’d definitely click on it….
So having a diverse skill set was definitely helpful. But there are really so many other things which go into self-publishing a book. Learning terminology — trim size, gutter margins, embeddable fonts. Getting an ISBN. Ordering proof copies. Etc., etc. Volume 2 will be so much simpler now that I’ve finished Volume 1!
It was definitely a challenge — but one that I hope will be worth it. Because there’s the one overarching question: will anybody actually buy The Puzzle Cabaret?
I chose to sell it on amazon.com since it was the simplest marketing strategy. (Click here to see it on Amazon!) Maybe I’ll try something different for Volume 2, but my goal was to keep the monetary investment to a minimum until I knew this type of book would be popular. I really only had to pay for the ISBN, ordering proof copies, and of course paper and toner for all of the printing….
So we must let time tell! And while I was able to do a lot on my own, I must acknowledge that I have some pretty awesome friends who also have some truly exceptional skills. Stacy Speyer (see what she’s up to) was a huge help with layout as a result of her vast experience with art and graphic design. Phil Webster (see what he’s up to) play-tested many, many puzzles and gave me invaluable feedback. And Stephen Campbell (see what he’s up to) gave good advice about looking forward to future volumes.
Advice for would-be self-publishers? Patience! I’ll just give one example. Everything was going smoothly until I tried to upload my manuscript and order a proof copy to see what the final product would look like. No luck. I got some errors, and the (not-so-) helpful people at amazon.com essentially said that well, since I was using LaTeX, too bad.
Stacy came to the rescue — she’s published many books before. She just took my pdf file, uploaded it into her software, and exported it as — you guessed it — a pdf. Bingo! Of course this violates a basic mathematical principle: while 2 = 2, it is absolutely not the case that pdf = pdf. Oh, well. You get the point. With so many different variables present in the self-publishing process, something(s) will inevitably go awry. So the second piece of advice? Have smart friends!
 . The “1” followed by infinitely many zeroes — which Porterdunk calls “die Uberzahl” as an homage to Nietzsche — also has multiple presentations. “What makes the analysis of Titans a bit tricky is that they may have uncountably infinitely many representations,” said Porterdunk.
. The “1” followed by infinitely many zeroes — which Porterdunk calls “die Uberzahl” as an homage to Nietzsche — also has multiple presentations. “What makes the analysis of Titans a bit tricky is that they may have uncountably infinitely many representations,” said Porterdunk. the limit
the limit  exists, and (2) if
exists, and (2) if  then
then  Porterdunk calls numbers of the form
Porterdunk calls numbers of the form  where
where  is prime, uberprimes.
is prime, uberprimes. where either
where either  or at least one of the
or at least one of the  is infinite. “The trick is to find a well-ordering on the Titans,” said Porterdunk. “Then show that the set of Titans has a unique maximal element. Done!”
is infinite. “The trick is to find a well-ordering on the Titans,” said Porterdunk. “Then show that the set of Titans has a unique maximal element. Done!” and the Titan
and the Titan  that is, the product of all the odd primes. Which is larger?
that is, the product of all the odd primes. Which is larger? is, since each odd prime is larger than 2. On the other hand, if you look at the first two powers of 2 multiplied together, the result is larger than 3. Then the next three together are larger than 5, the next three larger than 7, and so on. So
is, since each odd prime is larger than 2. On the other hand, if you look at the first two powers of 2 multiplied together, the result is larger than 3. Then the next three together are larger than 5, the next three larger than 7, and so on. So  must be larger. “Consequently, you must be very, very careful when well-ordering the Titans. Pitfalls are everywhere,” remarked Porterdunk.
must be larger. “Consequently, you must be very, very careful when well-ordering the Titans. Pitfalls are everywhere,” remarked Porterdunk. and
and  “If it helps you to sleep at night, go ahead and think that,” said Porterdunk. “But I can assure you, there is a bit more than that to a representation theory for Titans.” Rather an understatement, I should say!
“If it helps you to sleep at night, go ahead and think that,” said Porterdunk. “But I can assure you, there is a bit more than that to a representation theory for Titans.” Rather an understatement, I should say! is the limit of a sequence of Titans
is the limit of a sequence of Titans  and if some property holds for each of the
and if some property holds for each of the 
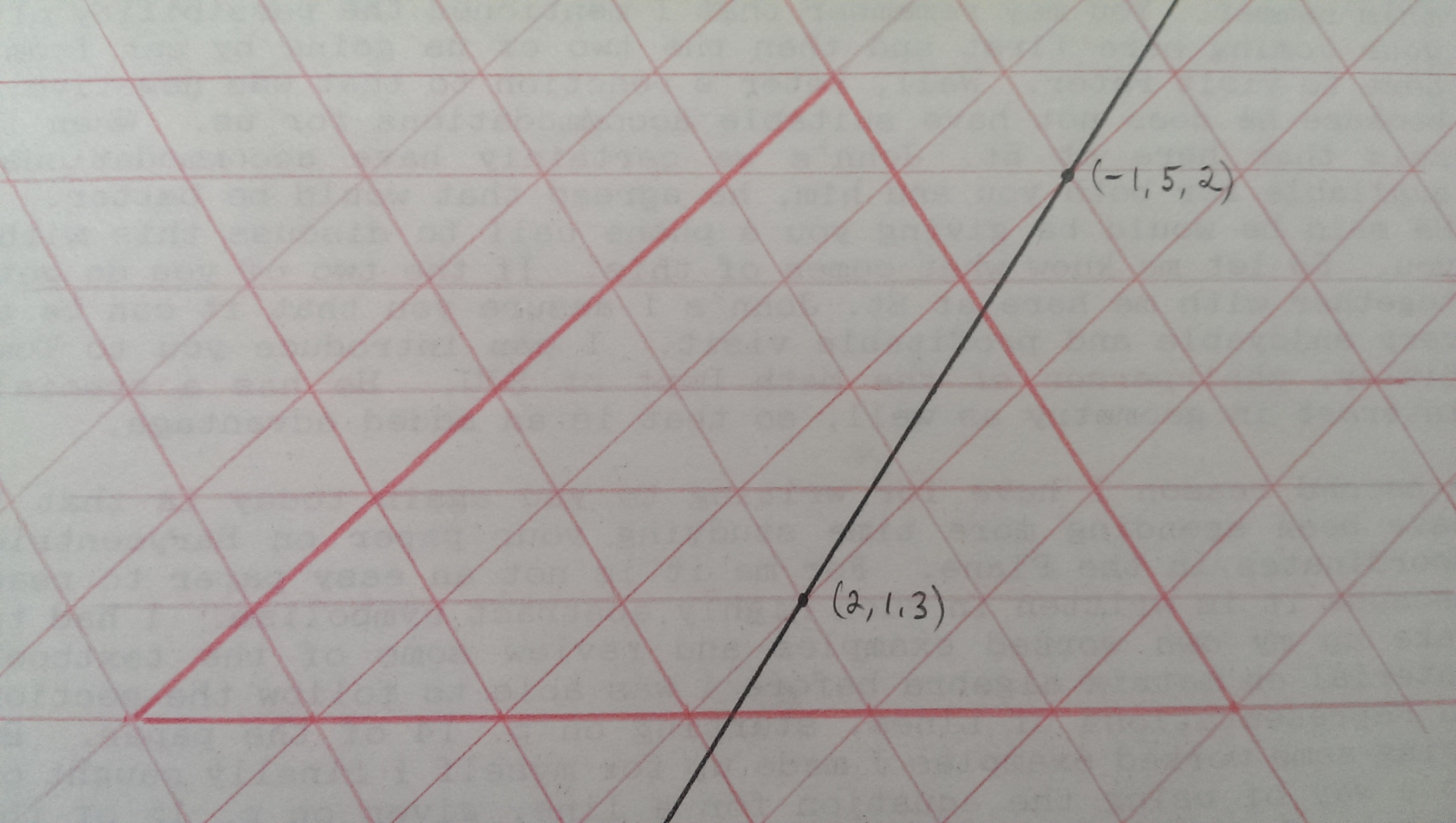
 and many have encountered
and many have encountered  as a representation of a point in three-dimensional space.
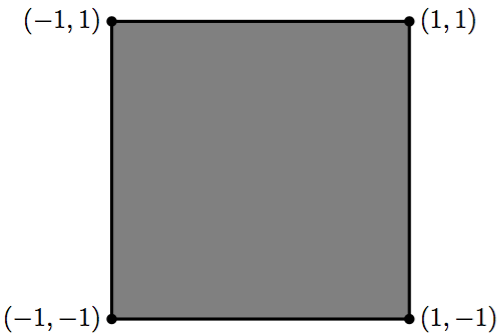
as a representation of a point in three-dimensional space.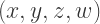 (yes, the “
(yes, the “ ” comes last, so the other coordinates continue to make sense in the usual way).
” comes last, so the other coordinates continue to make sense in the usual way). -dimensional real space, usually denoted by the symbol “
-dimensional real space, usually denoted by the symbol “ ” In the general case, we have lists of
” In the general case, we have lists of 


 and
and 



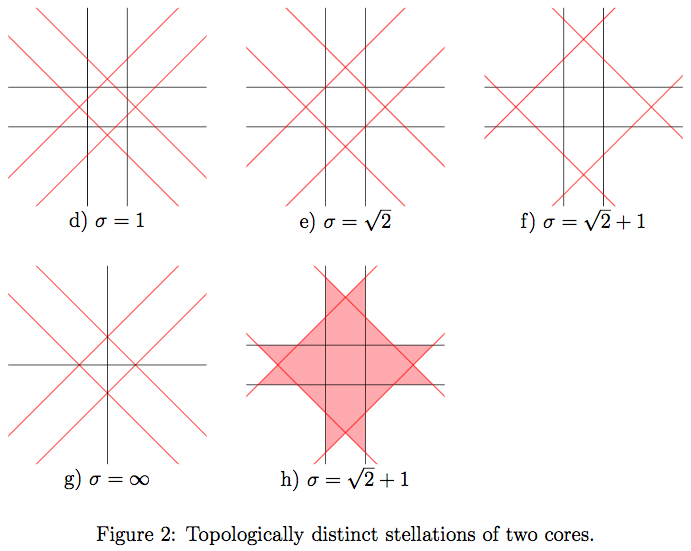
 Notice that the octagram is divided into 17 smaller pieces by its edges.
Notice that the octagram is divided into 17 smaller pieces by its edges.