A few weeks ago, I began a discussion of what I’d be presenting in a series of twenty (or so) 5—7 minute videos on three-dimensional geometry. I didn’t get very far then, so it’s time to continue….
So to recap a bit, I’ll begin with the usual cones/cylinders/spheres, looking at surface areas and contrasting flat surfaces with the surface of a sphere. Then on to a prelude to calculus by looking at the volume of a cone as a limiting case of a stack of circular disks.
Next, it’s on to polyhedra! A favorite topic of mine, certainly. Polyhedra are interesting, even from the very beginning, since there is still no accepted definition of what a polyhedron actually is. The exception is for convex polyhedra; a perfectly good definition of a convex polyhedron is the convex hull of a finite set of points not all lying in a single plane. Easy enough.
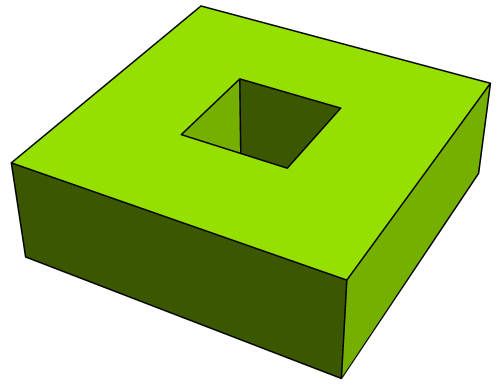
But once you move on to nonconvexity, uncertainties abound. For example, from a historical perspective, sometimes the object below was a polyhedron, and sometimes it wasn’t. Sounds odd, but whether or not you consider this object a polyhedron depends on how you look at the top “face,” which is a square with a smaller square removed from the center. Now is this “face” a polygon, or not? Many definitions of a polygon would exclude this geometrical object – which is problematic if you want to say that a polyhedron has polygons as faces.
So this brings us to a definition of a polygon, which is problematic in its own way – to see why, you can look at a previous post of mine on the definition of a polygon. Now the point here is not to resolve the issue in an elementary lecture, but rather point out that mathematics is not “black-and-white,” as students tend to believe. Also, it provides a nice example of the importance of definitions in mathematics.
Now this would be discussed briefly in just one video. Next would be the (obligatory) Platonic solids – where else is there to begin? The simplest starting point is the geometric enumeration by looking at what types of polygons – and how many – can appear at any given vertex of a Platonic solid. This enumeration is straightforward enough.
Next, I plan on computing the volume of a regular tetrahedron using the usual 
Of course you get the same result. But for those of us who work a lot in three-dimensional space, we deeply understand the simple algebraic equation, 
This simple fact is at the heart of any number of intriguing geometrical relationships between polyhedra in three dimensions. In particular, and quite importantly, the simplex and the cross-polytope together fill space. This relationship is at the heart of many architectural constructions in additional to generating other tilings of space with Archimedean solids. But most students have never seen this illustrated before, so I think it is important to include.
Then on to a geometry/algebra relationship: having enumerated the Platonic solids geometrically, how do we proceed to take an algebraic approach? A fairly direct way is to use Euler’s formula to find an algebraic enumeration.
No, I don’t intend to prove Euler’s formula; by far my favorite (and best!) is Legendre’s proof which involves projecting a polyhedron onto a sphere and looking at the areas of the spherical polygons created. This is a bit beyond the scope of this series of videos; there simply isn’t time for everything. But it is important to note the role that convexity plays here; yes, there are other formulas for polyhedra which are not essentially “spheres,” but this is not the place to discuss them.
Next, I want to talk about “buckyballs.” I still have somewhat of a pet peeve about the nomenclature – Buckminster Fuller did not invent the truncated icosahedron – and so the physicists who named this molecule were, in my opinion, polyhedrally rather naïve. But, sadly (as is the case so many times), they did not come to me first before making such a decision…
The polyhedrally interesting fact about buckyballs is this: if a polyhedron has just pentagonal and hexagonal faces, three meeting at every vertex, then there must be exactly twelve pentagons. Always.
Now I know that the polyhedrally savvy among you are well aware of this – but for those who aren’t, I’ll show you the beautiful and very short proof. Once you’ve seen the idea, I don’t think you’ll ever be able to forget it. It’s just remarkable – even with 123,456,789 hexagons, just 12 pentagons.
So let 



since each pentagon contributes five vertices, each hexagon contributes six, and three vertices of the polygons meet at each vertex of the buckyball.
Moreover, the number of edges is given by
since the polygons on the buckyball meet edge-to-edge. Of course, 

and what happens? It turns out that

Amazes me every time. But what I like about this fact is that it is accessible just knowing Euler’s formula – no more advanced concepts are necessary.
And yes, there’s more! This is now Lecture #12 of my series, so I have a few more to describe to you. Until next time, when I caution you (rather strongly) against peeling a 100-dimensional potato….
