I have recently had a rather unusual opportunity. I’ve talked a bit over the last few months about my consulting work producing online videos for a flipped classroom; I’ve been working busily on the Geometry unit.
Now the last section of this unit is on three-dimensional geometry, and I’ve been given pretty free reign as to what to cover in this 20-lectures series of 5-7 minute videos. And given my interest in polyhedra (which I could focus on exclusively with no shortage of things to discuss!), I felt I had a good start.
But the challenge was also to cover some traditional topics (cones, cylinders, spheres, etc.) — as well as more advanced topics — while not using mathematics beyond what I’ve used in the first several sections of the Geometry unit.
There is, of course, no “correct” answer to this problem. But I thought I’d share how I’d approach this series of lectures, since geometry is such a passion of mine — and I know it is for many readers as well. The process of reforming high school geometry courses is now well underway; I hope to contribute to this discussion with today’s post.
Where to start? Cones and cylinders — a very traditional beginning. But I thought I’d start with surface areas. Now for cylinders, this is pretty straightforward. It’s not much more difficult for cones, but the approach is less obvious than for cylinders.
Earlier in the unit, we derived the formula for the area of a sector of a circle, so finding the lateral surface area of a cone is a nice opportunity to revisit this topic. And of course, finding the lateral surface area of a cylinder involves just finding the area of a rectangle.
Now what do both of these problems have in common? Their solution implies that cones and cylinders are flat. In other words, we reduce what is apparently a three-dimensional problem (the surface area of a three-dimensional object) to a two-dimensional problem.
This is in sharp contrast to finding the surface area of a sphere — you can’t flatten out a sphere. In fact, the entire science of cartography has evolved specifically in response to this inability.
So this is a nice chance to introduce a little differential geometry! And no, I don’t really intend to go into differential geometry in any detail — but why not take just a minute in a lecture involving spheres to comment on why the formulas for the surface areas of cones and cylinders are fairly easy to derive, and why — at this level — we’re just given the formula for the surface area of a sphere.
I try to mention such ideas as frequently as I can — pointing out contrasts and connections which go beyond the usual presentation. Sure, it may be lost on many or most students, but it just may provide that small spark for another.
I think such comments also get at the idea that mathematics is not a series of problems with answers at the back of the book…on the face of it, there is no apparent reason for a student to think that finding the surface area of a cone would be simpler than finding the surface area of a sphere. This discussion gets them thinking.
Next, I’m planning to discuss Archimedes’ inscription of a sphere in a cylinder (which involves the relative volumes). This is a bit more straightforward, and it’s a nice way to bring in a little history.
I also plan to look at inscribing a sphere in a right circular cone whose slant height is the same as the diameter of the base, so that we can look at a two-dimensional cross-section to solve the problem. In particular, this revisits the topic of incircles of triangles in a natural way — I find it more difficult to motivate why you’d want to find an incircle when looking at a strictly two-dimensional problem.
Now on to calculus! Yes, calculus. One great mystery for students is the presence of “1/3” in so many volume formulas. There is always the glib response — the “3” is for “three” dimensions, like the “2” in “1/2 bh” is for “two” dimensions.
When deriving these formulas using integration, this is actually exactly a fairly solid explanation. But for high school students who have yet to take calculus?
It is easy to approximate the volume of a right circular cone by stacking thin circular disks on top of each other. If we let the disks get thinner and take more and more of them, we find the volume of the cone as limit of these approximations. All you need is the sum

I plan to prove that
and then prove (or perhaps just suggest — I’m not sure yet) the formula for the sum of squares.
I think a fairly informal approach could be successful here. But I do think such discussions are necessary — in calculus, I’ve routinely asked students why certain formulas they remember are true, and they struggle. As a simple example, students can rarely tell me why the hypotenuse of a 30-60-90 triangle is twice as long as the shorter leg.
When teachers just give students formulas and ask them to plug numbers in to get answers to oversimplified word problems, of course there is a sense of mystery/confusion — where did these formulas come from? I’m hoping that this discussion suggests that there is a lot more to mathematics than just a bunch of formulas to memorize.
As usual, I realize I have much more to say on this topic than I had originally supposed…I’ve only discussed up to the fifth lecture so far! Since I have not had extensive experience teaching more traditional topics at the high school, it has been an interesting challenge to tackle the usual geometry topics in a way that grabs students’ attention. It’s a challenge I enjoy, and of course I’ll have much more to say about it next week….
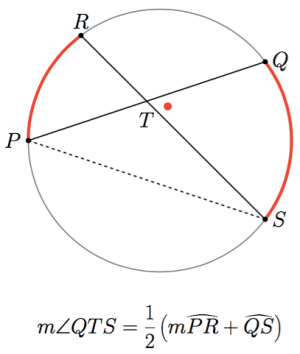
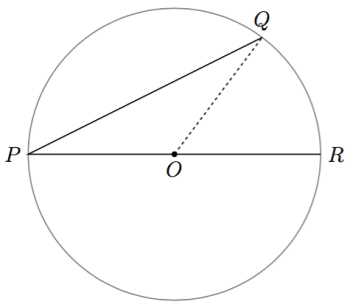
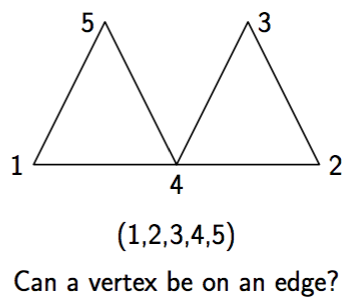
 as an angle exterior to
as an angle exterior to  The analysis of all the other cases builds from this.
The analysis of all the other cases builds from this.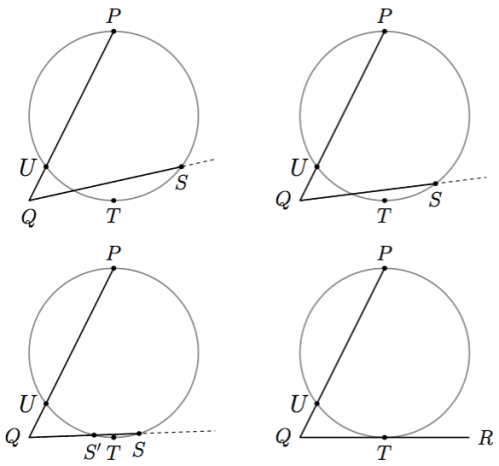
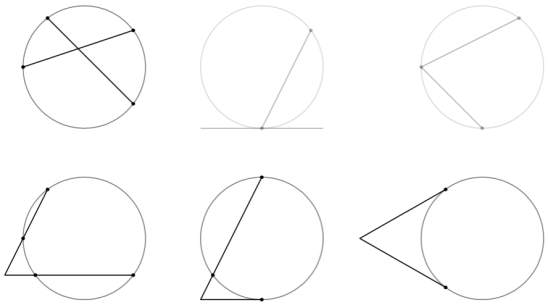
 moves around the circle. While, as mentioned, this cannot be addressed rigorously, it is a very intuitive argument. Moreover, there are many different software packages you could use to make an animation of this process, and display all the arc and angle measurements as
moves around the circle. While, as mentioned, this cannot be addressed rigorously, it is a very intuitive argument. Moreover, there are many different software packages you could use to make an animation of this process, and display all the arc and angle measurements as 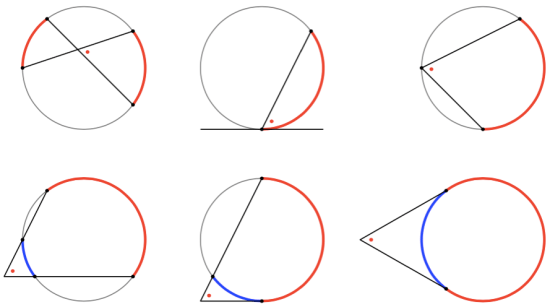

 and
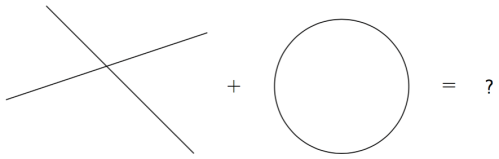
and  eventually reach 0, you’re not able to conclude anything about a relationship between
eventually reach 0, you’re not able to conclude anything about a relationship between  and
and 





 the natural logarithm? There are a few different ways this is usually shown, but here’s one I haven’t seen before: consider the limit
the natural logarithm? There are a few different ways this is usually shown, but here’s one I haven’t seen before: consider the limit


 I’m so conditioned to thinking of
I’m so conditioned to thinking of  as a constant that I never thought of turning it into the variable. It’s a nice proof.
as a constant that I never thought of turning it into the variable. It’s a nice proof.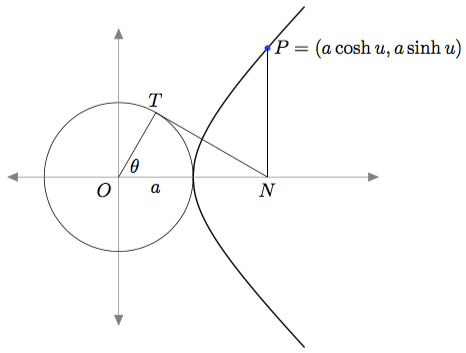
 The goal of this exercise is to find a geometrical interpretation of the relationship
The goal of this exercise is to find a geometrical interpretation of the relationship
 and consider the point
and consider the point
 on the x-axis to the point
on the x-axis to the point  Next, draw a tangent from
Next, draw a tangent from  to the auxiliary circle, meeting it at
to the auxiliary circle, meeting it at  Finally, join
Finally, join  to the origin.
to the origin. is tangent to the circle, we know that
is tangent to the circle, we know that  is a right triangle. Therefore
is a right triangle. Therefore  But by construction,
But by construction,  and so
and so







 amounts to multiplying the function by
amounts to multiplying the function by  and increasing the angle in the sine function by
and increasing the angle in the sine function by  Therefore
Therefore

 on the interval
on the interval ![[a,b],](https://s0.wp.com/latex.php?latex=%5Ba%2Cb%5D%2C&bg=ffffff&fg=333333&s=2&c=20201002) divide the interval into six equal subintervals with points
divide the interval into six equal subintervals with points  and corresponding function values
and corresponding function values  Then
Then

![[a,x].](https://s0.wp.com/latex.php?latex=%5Ba%2Cx%5D.&bg=ffffff&fg=333333&s=2&c=20201002) In other words, we want to find weights
In other words, we want to find weights 
 and
and  such that
such that
 and
and  about the point
about the point  The first is easy using the Fundamental Theorem of Calculus, assuming sufficient differentiability:
The first is easy using the Fundamental Theorem of Calculus, assuming sufficient differentiability:
 we need to evaluate several derivatives at
we need to evaluate several derivatives at 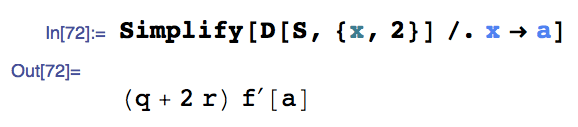
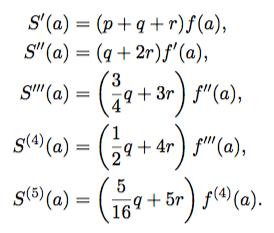
 as possible. This will make the derivatives of
as possible. This will make the derivatives of  and
and 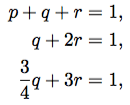

 and
and  Note that these values also imply that
Note that these values also imply that




 to create an approximation
to create an approximation

 and solve the first six equations in terms of
and solve the first six equations in terms of  This gives us
This gives us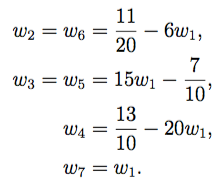

 which is in the interval just described. This gives the sequence of weights to be
which is in the interval just described. This gives the sequence of weights to be
 and you notice that all divisions are by 10. Can you see the advantage? If you have a table of values for your functions, you just need to multiply function values by a single-digit number, and then move the decimal place over one. An approximators dream!
and you notice that all divisions are by 10. Can you see the advantage? If you have a table of values for your functions, you just need to multiply function values by a single-digit number, and then move the decimal place over one. An approximators dream! and
and 
 for example, using this parameterization. Of course
for example, using this parameterization. Of course  is just three times the triple
is just three times the triple  therefore, if you can generate all primitive Pythagorean Triples, you can take multiples of them to generate all Pythagorean Triples.
therefore, if you can generate all primitive Pythagorean Triples, you can take multiples of them to generate all Pythagorean Triples. has side lengths which are in arithmetic progression. What other Pythagorean Triples have this property?
has side lengths which are in arithmetic progression. What other Pythagorean Triples have this property? where
where  is the smallest integer in the arithmetic progression and
is the smallest integer in the arithmetic progression and  is the common difference. Since the triangle is a right triangle, we must have
is the common difference. Since the triangle is a right triangle, we must have


 or
or  We did assume that
We did assume that  so we eliminate the solution
so we eliminate the solution  Note that this would generate the triple
Note that this would generate the triple  and in fact
and in fact  But one side length is zero and another is negative, so no triangle is possible with these side lengths.
But one side length is zero and another is negative, so no triangle is possible with these side lengths. ? Here, we get
? Here, we get
 of the primitive Pythagorean Triple
of the primitive Pythagorean Triple 
 right triangle.
right triangle. triangle, the area and perimeter were both
triangle, the area and perimeter were both  A coincidence? Were there other triangles with this property?
A coincidence? Were there other triangles with this property?
 is necessary since the two-variable version generates all primitive Pythagorean Triples, but not necessarily all Pythagorean Triples.
is necessary since the two-variable version generates all primitive Pythagorean Triples, but not necessarily all Pythagorean Triples.

 results in
results in
 and the other two factors must be
and the other two factors must be 
 then
then  so that
so that  Substituting back into the parameterization, we obtain the Pythagorean Triple
Substituting back into the parameterization, we obtain the Pythagorean Triple  which is the triple
which is the triple 
 then
then  so that
so that  This generates a new Pythagorean Triple,
This generates a new Pythagorean Triple, 
 then
then  and
and  so that the Pythagorean Triple
so that the Pythagorean Triple  is generated. Of course this is just a duplicate of the first solution.
is generated. Of course this is just a duplicate of the first solution. and that their perimeters are equal. Prove that the triangles are congruent.
and that their perimeters are equal. Prove that the triangles are congruent.
 is called the carrying capacity of the environment.
is called the carrying capacity of the environment. and so the population growth is almost exponential. But when
and so the population growth is almost exponential. But when  gets very close to
gets very close to  then
then 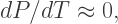 and so population growth slows down. And of course when
and so population growth slows down. And of course when  growth stops — hence calling
growth stops — hence calling 
 and
and 


 and
and  to write
to write
 and
and  we need to scale by a factor of
we need to scale by a factor of  so that the asymptotes of the logistic curve are
so that the asymptotes of the logistic curve are 
 and
and 
 We can accomplish this be replacing
We can accomplish this be replacing  with
with 



 is an odd function, becomes
is an odd function, becomes
 might be suggested, but how would we relate this to the exponential function?
might be suggested, but how would we relate this to the exponential function?
 using the hyperbolic trigonometric substitution
using the hyperbolic trigonometric substitution  Today, we’ll look at this substitution in more depth.
Today, we’ll look at this substitution in more depth. and
and  is described by the gudermannian function, defined by
is described by the gudermannian function, defined by
 so that this relationship is in fact invertible.
so that this relationship is in fact invertible.
 to obtain the quadratic
to obtain the quadratic

 then
then  must be an increasing function of
must be an increasing function of  It is not difficult to see that we must choose “plus,” so that
It is not difficult to see that we must choose “plus,” so that  and consequently
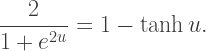
and consequently

 by
by  in order to form an isosceles triangle. Thus,
in order to form an isosceles triangle. Thus,
 observe that
observe that  is supplementary to both
is supplementary to both  and
and  so that
so that



 giving
giving



 giving
giving
 Again using the usual circular trigonometric identities, we can show that
Again using the usual circular trigonometric identities, we can show that

 and
and 
 is the inverse of the gudermannian function, then
is the inverse of the gudermannian function, then 

 so that
so that  and the integral transforms to
and the integral transforms to


 so that
so that  and
and  Note well that taking the positive square root is always correct, since
Note well that taking the positive square root is always correct, since  is always positive!
is always positive!

 and
and
 and so our integral finally becomes
and so our integral finally becomes
 What this means is — no need to ever integrate
What this means is — no need to ever integrate
 and
and  which involve integration by parts. Simply put, it is not a good use of time. I think it is far better to introduce students to hyperbolic trigonometric substitution.
which involve integration by parts. Simply put, it is not a good use of time. I think it is far better to introduce students to hyperbolic trigonometric substitution.
 and transform the integral into
and transform the integral into
 We get
We get  and
and  (here, a negative square root may be necessary).
(here, a negative square root may be necessary).

 which may be found using the same technique we used last week for
which may be found using the same technique we used last week for 




 and
and  may be computed by using the substitutions
may be computed by using the substitutions  and
and  respectively. It bears repeating: no more integrals involving powers of tangents and secants!
respectively. It bears repeating: no more integrals involving powers of tangents and secants!
 work above? For the same reason
work above? For the same reason  works: we can simplify
works: we can simplify  using one of the following two identities:
using one of the following two identities:
 is playing the role of
is playing the role of  and
and  What does that suggest? Try using the substitution
What does that suggest? Try using the substitution  !
! we have
we have
 — just look at the above identities and compare. We remark that if
— just look at the above identities and compare. We remark that if  then as a result of the asymptotic behavior, the substitution
then as a result of the asymptotic behavior, the substitution  and between the graphs of
and between the graphs of  In this case, the signs are always correct —
In this case, the signs are always correct — 



 so there is no need to put the argument of the logarithm in absolute values.
so there is no need to put the argument of the logarithm in absolute values.