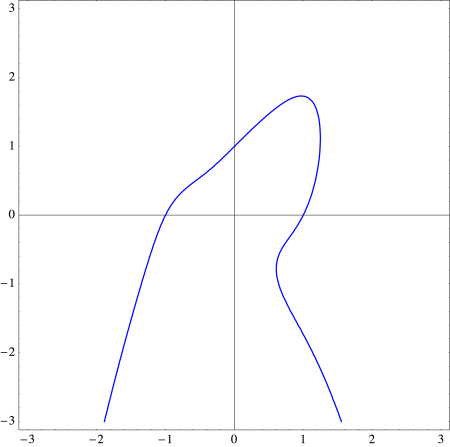
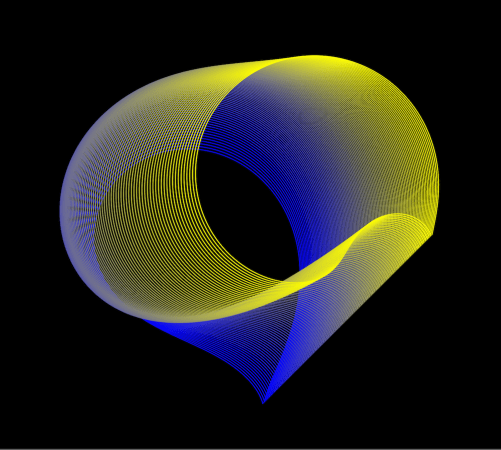
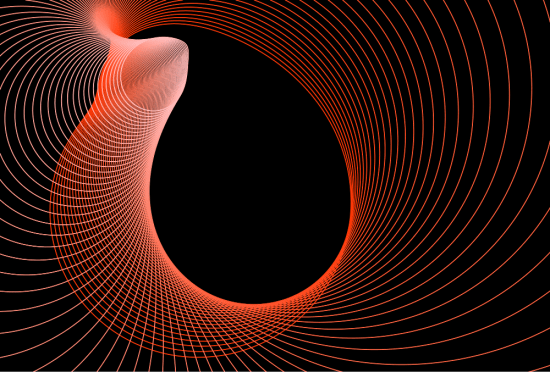
A few weeks, ago I dug out a problem which had puzzled me for over three years. I finally decided that now it was time to really dig in — and to my surprise and delight, not only did I solve the problem, but I’ve already got a draft of a paper written! The figure below is from that paper.

The problem is yet another variation on the recursion which produces the Koch snowflake. I discussed the Koch snowflake in one my first posts, so visit my Day007 post on this fascinating fractal for a refresher.
So what is the variation here? Consider the general recursive scheme

where 

The Koch curve is generated by choosing

Previously I’ve studied cases where 

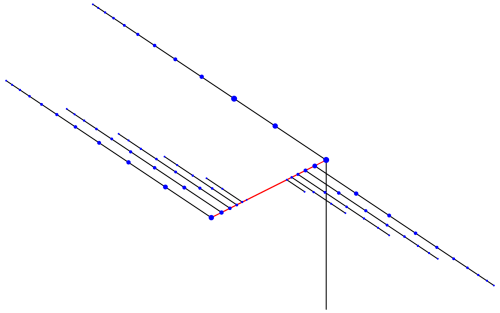
So let’s investigate the example illustrated above in more detail. The recursive scheme which generates this spiral is given by

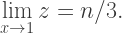
How does this scheme draw a spiral arm? Let’s look at the figure below.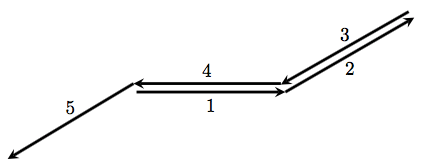
We begin at the origin, and then draw a segment at 


The next turn is 


What next? It is at this point that we invoke a recursive call — and so the next angle tells us what direction the next arm will be drawn in. Of course, like before, the three angles after that will continue drawing the arm and then bring us back to the origin, awaiting the next recursive call.
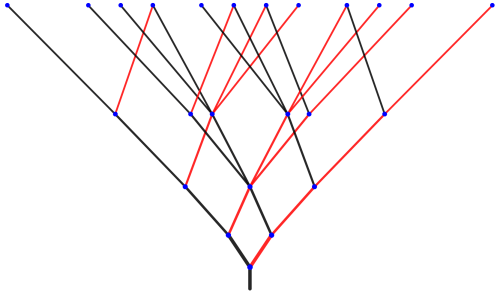
This behavior can be illustrated in the following chart.
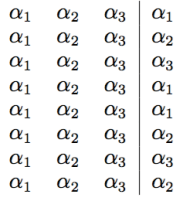
Here, the angles turned are listed in rows of four, one after another. The first three angles in each row are the same, and their job is to complete the arm once a direction is chosen. But the direction chosen is determined by the fourth column (separated by the divider), whose behavior is not periodic and highly recursive.
So where do we go from here? The next chart we’ll look it is a chart of the directions the arms are drawn in.
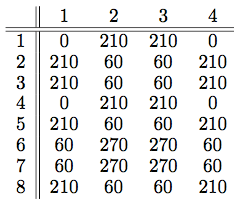
We read this chart in rows as follows: the first arm is drawn at an angle of 
But the third arm exactly retraces the second arm drawn, since it is pointed in the direction of 

So you can see what’s going on. One important consequence of the recursive algorithm is that the arms keep being retraced over and over again.
When will the complete spiral be drawn? Well, we need to see every multiple of
How would you show this? We can’t go into all the details here. The important observation is that if you read across the chart one row at a time, you get the same sequence of angles by reading down the first column of the chart.
But it isn’t enough to just observe this — it has to be proved. This is where some elementary number theory comes in. No more than what might be seen in an undergraduate number theory course, but beyond the scope of this post.
Slight step up on my soapbox — while I usually deplore the definition of mathematics as the “science of finding patterns” (as this only scratches the surface), in this case, finding patterns is critically important. With some trial and error, you hit upon making charts in rows of four, and then putting the directions the arms are drawn in rows of four, and then stare at the numbers until you notice patterns in the charts. The trick is knowing what to prove — once stated properly, the results almost prove themselves.
You’ll have to wait for the paper to come out for all the details. But here is a brief summary. Suppose you divide the circle into n parts, where n is even. Then devise a recursive scheme using the turning angles

Now define

When n is divisible by 4, the spiral has n arms, and you need to draw exactly 

But when n is even but not divisible by four, the spiral only has n/2 arms, and it takes 
Absolutely amazing, in my opinion. I formulated these conjectures over three years ago, but got stuck. A few weeks ago I had the house to myself for a while, and I just sat down and said to myself, “Look, you’ve already written one paper on these recursions. You can do this.”
And within two days, I worked out the patterns. Then the proofs, and within a week, a draft of the paper.
I am always humbled by such a seemingly innocuous problem — generating a simple spiral . But there are so many levels to this problem, and so much interesting mathematics to be discovered. I’ll continue exploring recursively drawn images, and share the amazing results with you when I find them!
 as an angle exterior to
as an angle exterior to  The analysis of all the other cases builds from this.
The analysis of all the other cases builds from this.
 moves around the circle. While, as mentioned, this cannot be addressed rigorously, it is a very intuitive argument. Moreover, there are many different software packages you could use to make an animation of this process, and display all the arc and angle measurements as
moves around the circle. While, as mentioned, this cannot be addressed rigorously, it is a very intuitive argument. Moreover, there are many different software packages you could use to make an animation of this process, and display all the arc and angle measurements as 

 and
and  eventually reach 0, you’re not able to conclude anything about a relationship between
eventually reach 0, you’re not able to conclude anything about a relationship between  and
and 





 and
and  then
then
 for example, using this parameterization. Of course
for example, using this parameterization. Of course  is just three times the triple
is just three times the triple  therefore, if you can generate all primitive Pythagorean Triples, you can take multiples of them to generate all Pythagorean Triples.
therefore, if you can generate all primitive Pythagorean Triples, you can take multiples of them to generate all Pythagorean Triples. has side lengths which are in arithmetic progression. What other Pythagorean Triples have this property?
has side lengths which are in arithmetic progression. What other Pythagorean Triples have this property? where
where  is the smallest integer in the arithmetic progression and
is the smallest integer in the arithmetic progression and  is the common difference. Since the triangle is a right triangle, we must have
is the common difference. Since the triangle is a right triangle, we must have


 or
or  We did assume that
We did assume that  so we eliminate the solution
so we eliminate the solution  Note that this would generate the triple
Note that this would generate the triple  and in fact
and in fact  But one side length is zero and another is negative, so no triangle is possible with these side lengths.
But one side length is zero and another is negative, so no triangle is possible with these side lengths. ? Here, we get
? Here, we get
 of the primitive Pythagorean Triple
of the primitive Pythagorean Triple 
 right triangle.
right triangle. triangle, the area and perimeter were both
triangle, the area and perimeter were both  A coincidence? Were there other triangles with this property?
A coincidence? Were there other triangles with this property?
 is necessary since the two-variable version generates all primitive Pythagorean Triples, but not necessarily all Pythagorean Triples.
is necessary since the two-variable version generates all primitive Pythagorean Triples, but not necessarily all Pythagorean Triples.

 results in
results in
 and the other two factors must be
and the other two factors must be 
 then
then  so that
so that  Substituting back into the parameterization, we obtain the Pythagorean Triple
Substituting back into the parameterization, we obtain the Pythagorean Triple  which is the triple
which is the triple 
 then
then  so that
so that  This generates a new Pythagorean Triple,
This generates a new Pythagorean Triple, 
 then
then  and
and  so that the Pythagorean Triple
so that the Pythagorean Triple  is generated. Of course this is just a duplicate of the first solution.
is generated. Of course this is just a duplicate of the first solution. and that their perimeters are equal. Prove that the triangles are congruent.
and that their perimeters are equal. Prove that the triangles are congruent.
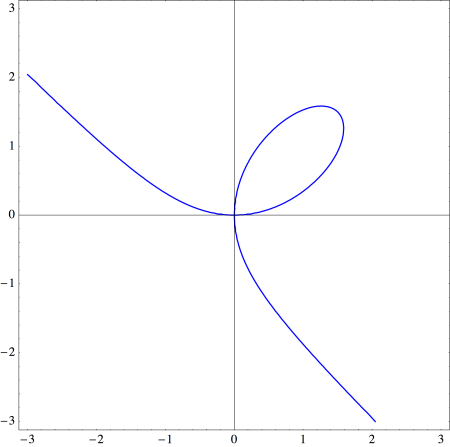
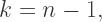
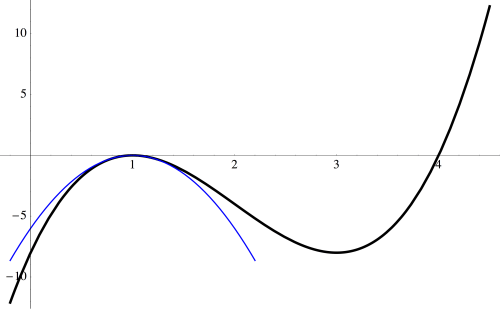
 where it crosses the x-axis at
where it crosses the x-axis at  we simply retain the
we simply retain the  term and substitute the root
term and substitute the root  into the other terms, getting
into the other terms, getting

 (the U-shaped piece, since the sideways U-shaped piece involves writing
(the U-shaped piece, since the sideways U-shaped piece involves writing  as a function of
as a function of  ) is
) is  as shown below.
as shown below.

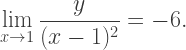
 and so rewrite the equation for the Folium of Descartes by using the substitution
and so rewrite the equation for the Folium of Descartes by using the substitution  which results in
which results in
 we have
we have  giving us a good quadratic approximation at the origin.
giving us a good quadratic approximation at the origin. looking at the curve
looking at the curve

 with
with 
 we have
we have
 Thus, in our case with
Thus, in our case with  we see that
we see that  is a good approximation to the curve near the origin. The graph below shows just how good an approximation it is.
is a good approximation to the curve near the origin. The graph below shows just how good an approximation it is.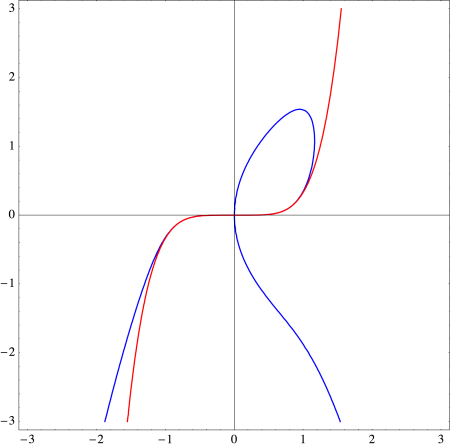

 which results in
which results in
 here. But if we move the
here. But if we move the  to the other side and factor, we get
to the other side and factor, we get
 to obtain
to obtain
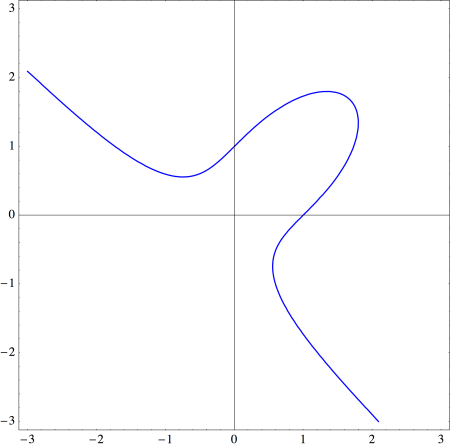
 And sure enough, the line
And sure enough, the line  does the trick:
does the trick:


 This results in
This results in
 is even, since there is always a root at
is even, since there is always a root at  in this case. Here, we make the substitution
in this case. Here, we make the substitution  move the
move the  resulting in
resulting in
 is a factor of
is a factor of  so we have
so we have

 as well! This is a curious coincidence, for which I have no nice geometrical explanation. The case when
as well! This is a curious coincidence, for which I have no nice geometrical explanation. The case when  is illustrated below.
is illustrated below.


 occurs quadratically.
occurs quadratically.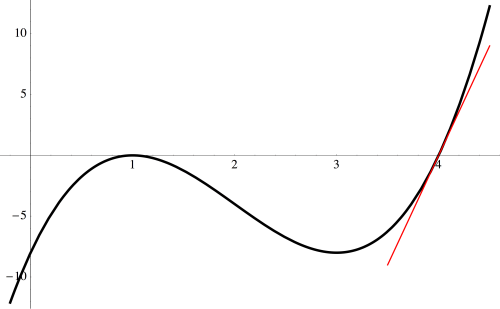
 the graph passes through the x-axis like a line — and we see a linear factor of
the graph passes through the x-axis like a line — and we see a linear factor of  in our polynomial.
in our polynomial.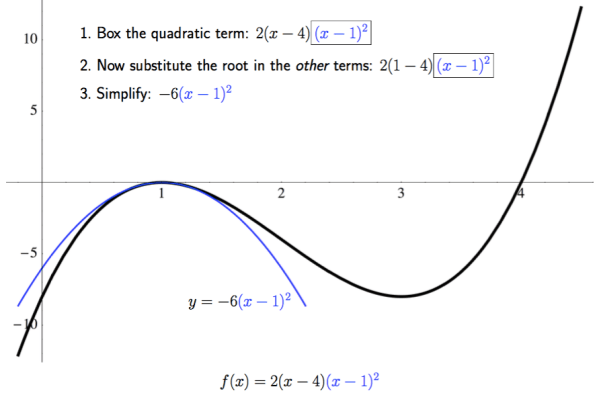
 and substitute the root,
and substitute the root,  near the root
near the root 
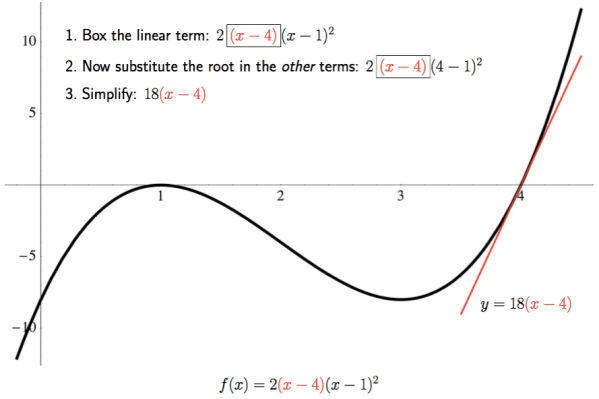
 substitute
substitute  in the remaining terms of the polynomial, and then simplify. Thus, the line
in the remaining terms of the polynomial, and then simplify. Thus, the line  best describes the behavior of the graph of the polynomial as it passes through the x-axis. Again, note the scale on the axes.
best describes the behavior of the graph of the polynomial as it passes through the x-axis. Again, note the scale on the axes. Begin by sketching the three approximations near the roots of the polynomial. This slide also shows the calculation for the cubic approximation.
Begin by sketching the three approximations near the roots of the polynomial. This slide also shows the calculation for the cubic approximation.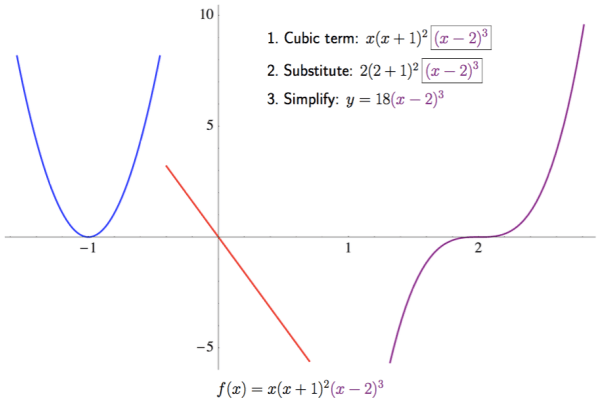

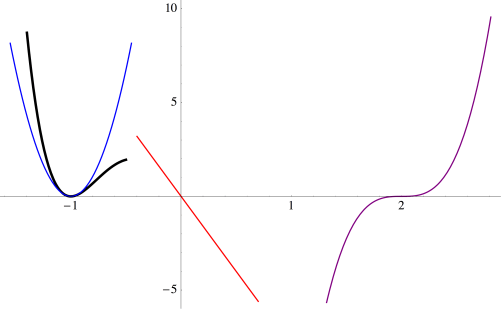
 Of course you’d need to plot a few points to know just where to start and end; this just shows how you would use the approximations near the roots to help you sketch a graph of a polynomial.
Of course you’d need to plot a few points to know just where to start and end; this just shows how you would use the approximations near the roots to help you sketch a graph of a polynomial.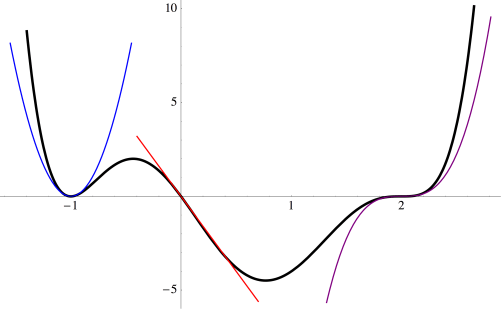
 near the root
near the root  Given what we’ve just been observing, we’d guess that the best approximation near
Given what we’ve just been observing, we’d guess that the best approximation near  would just be
would just be 
 match at
match at  derivatives of both of these functions at
derivatives of both of these functions at  will always be a factor — since at most
will always be a factor — since at most  term to completely “disappear.”
term to completely “disappear.” at
at  What about the
What about the  When a derivative of
When a derivative of  is taken, that means one factor of
is taken, that means one factor of  we also get
we also get  and
and 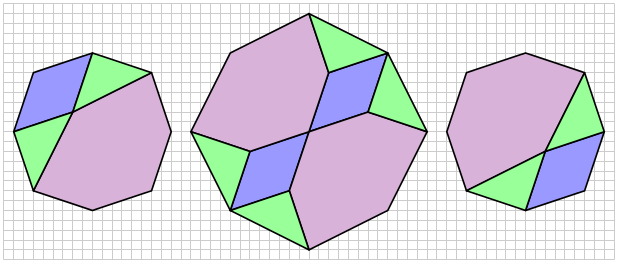
 Imagine a square — a square with side length
Imagine a square — a square with side length  has area
has area  while a square with side length
while a square with side length  has area
has area  — which is double the area.
— which is double the area. you need to take a diagonal of a unit square, which rotates the segment by 45° as well as scales it by a factor of
you need to take a diagonal of a unit square, which rotates the segment by 45° as well as scales it by a factor of 
 so that the dodecagon is convex and actually has 12 sides; if
so that the dodecagon is convex and actually has 12 sides; if  four pairs of sides are in perfect alignment and the figure becomes an octagon.
four pairs of sides are in perfect alignment and the figure becomes an octagon.
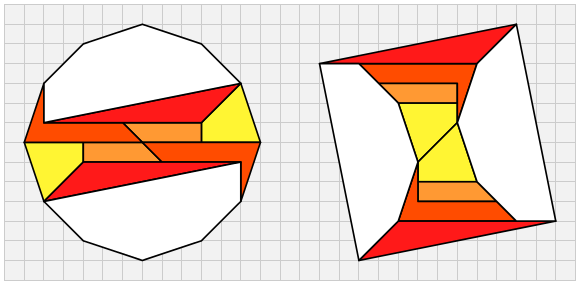
 So in order to create a dissection, we must find a solution to the equation
So in order to create a dissection, we must find a solution to the equation
 You get a dissection which looks like this:
You get a dissection which looks like this:



![[OP]\cdot[OP']=1,](https://s0.wp.com/latex.php?latex=%5BOP%5D%5Ccdot%5BOP%27%5D%3D1%2C&bg=ffffff&fg=333333&s=0&c=20201002)
![[AB]](https://s0.wp.com/latex.php?latex=%5BAB%5D&bg=ffffff&fg=333333&s=0&c=20201002) denotes the distance from A to B. Feel free to reread the previous two posts on inversive geometry for a refresher (here are links to the
denotes the distance from A to B. Feel free to reread the previous two posts on inversive geometry for a refresher (here are links to the  Points on a ray drawn from the origin through P will then have coordinates
Points on a ray drawn from the origin through P will then have coordinates  where
where  Thus, we just need to find the right
Thus, we just need to find the right  so that the point
so that the point  satisfies the definition of an inverse point.
satisfies the definition of an inverse point.
 and
and  if you substitute
if you substitute  everywhere you see
everywhere you see  and substitute
and substitute  everywhere you see
everywhere you see  From our previous work, we know that the inverse curve must be a circle going through the origin.
From our previous work, we know that the inverse curve must be a circle going through the origin.


 being the origin with coordinates
being the origin with coordinates  ?
? translate to the point
translate to the point  so that the point
so that the point 

 about the point
about the point 
 inverted about a series of equally spaced points along the line segment with endpoints
inverted about a series of equally spaced points along the line segment with endpoints  and
and  This might seem a little arbitrary, but it takes quite a bit of experimentation to find a set of points to invert about in order to create an aesthetically pleasing image.
This might seem a little arbitrary, but it takes quite a bit of experimentation to find a set of points to invert about in order to create an aesthetically pleasing image.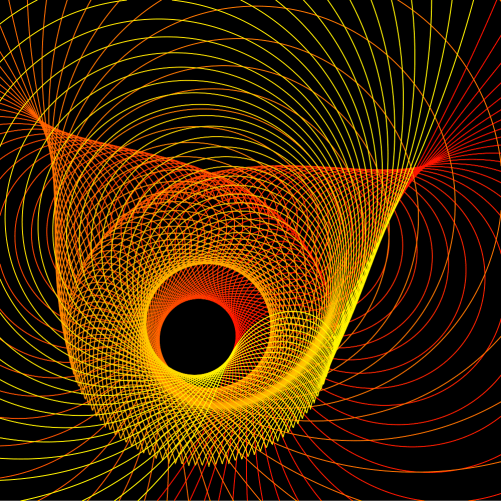
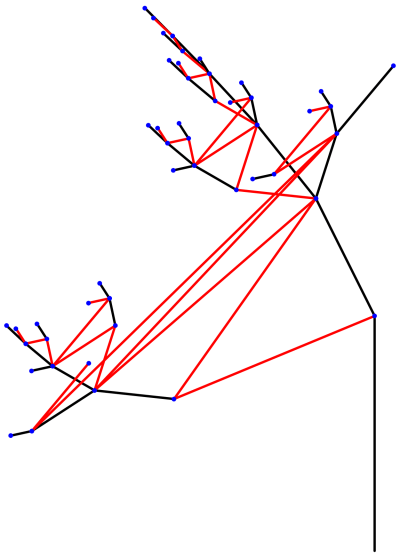
 and that which generate the red branches by
and that which generate the red branches by  you will observe behavior like that in the above tree if
you will observe behavior like that in the above tree if
 is a scaled rotation by 60°. This is what produces the spirals of red branches emanating from the nodes of the tree.
is a scaled rotation by 60°. This is what produces the spirals of red branches emanating from the nodes of the tree.